
全链路自研调度算法,多网络智能自适应
深度定制传输策略,兼容多种网络场景,复杂环境稳定操控

公网部署
全球200+边缘节点就近接入智能调度最优传输路径开箱即用,按量计费适合:户外巡检、物流配送、农业机器人
专网部署
数据不出企业边界BYOC模式,容器化部署兼容主流云平台(阿里云/腾讯云/AWS)适合:电力巡检、智慧能源、军工
局域网
无需公网连接,完全局域网运行支持自组网 Mesh / Ad-hoc轻量化部署,低资源占用适合:地下管廊、矿井、密闭空间作业
卫星网络
针对高延迟链路优化自适应码率与抖动缓冲断点续传与离线缓存适合:海洋勘探、沙漠油田、极地科考
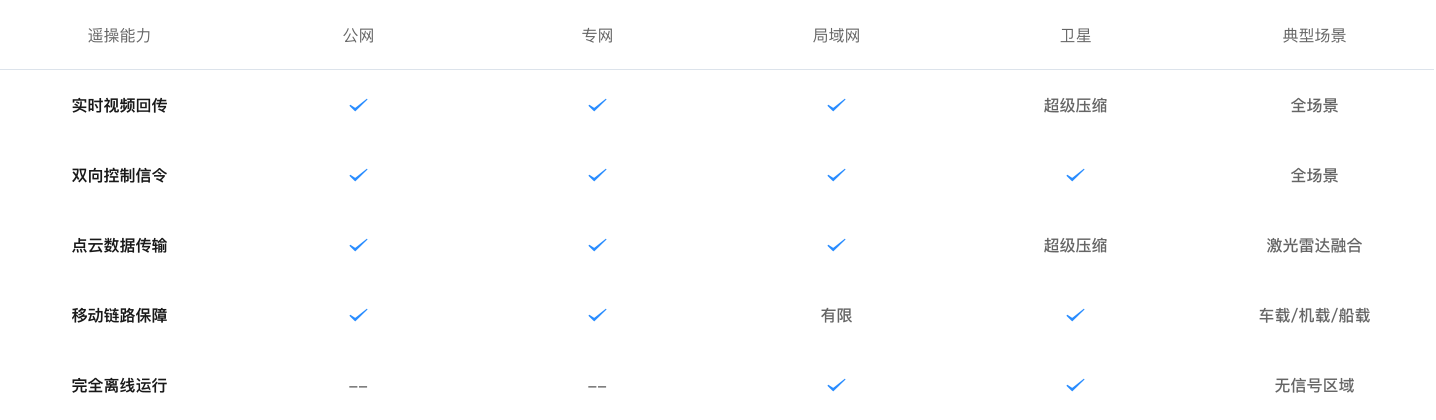
部署能力矩阵
不是"兼容"机器人系统,而是"原生集成"
AIRTC原生适配 ROS,优先保障控制指令与高精度时间同步
ROS / ROS 2 原生集成
原生零转换
无缝适配机器人开发栈
- 通过 ROS Topic 直接订阅图像流,无需中间转换层
- 控制指令映射到 ROS Action/Service,保持原有开发习惯
- 支持 TF 坐标系变换数据同步传输
- 兼容 Nav2 / MoveIt 等主流导航和运动规划框架
Linux / 嵌入式 Linux
<64MB RAM
轻量高效,多平台兼容
- 支持ARM Cortex-A系列(RK3588/Jetson/树莓派)
- 提供 C/C++ SDK,可直接嵌入现有固件
- 低内存占用,最小运行环境 < 64MB RAM
- 支持硬件编解码加速(VPU / NPU)
RTOS平台
硬实时响应
资源受限设备专用方案
- 轻量级 SDK,适用于资源受限的传感器节点
- 支持作为 ROS 系统的从节点或独立采集终端
- 确定性延迟保证,满足硬实时控制需求
- 兼容主流 RTOS 系统,适配 FreeRTOS / ThreadX / Zephyr
集成架构
私有部署技术选型建议
不止是音视频传输,更是机器人通信引擎
机器人专属通信引擎,音视频、点云数据、控制指令、设备状态同步传输

控制信令优先调度
视频可以丢帧,但控制指令不能延迟。AIRTC 将控制信令设为最高优先级, 在带宽紧张时自动降级视频质量,确保操控响应始终在安全阈值内。

亚毫秒级时间同步
机器人多传感器数据融合需要严格的时间基准。基于自研技术,实现设备间亚毫秒级时钟同步,确保视频帧与 IMU 数据、控制指令的时间戳精确对齐。
弱网自适应传输
AIRTC自研弱网对抗算法, 50% 丢包率下仍可流畅操控。高速移动场景下自动切换基站,不断连不卡顿。

多模态数据同步
视频流、深度图、点云、IMU、力觉反馈、控制信令统一接入、 时间戳对齐后打包传输。接收端按时间窗口重组,避免感官不同步导致的操作失误。

移动链路无缝切换
车载/机载/船载机器人在高速移动中频繁切换基站和网络制式。 AIRTC 的双通道冗余机制实现毫秒级切换,用户几乎无感知。

端到端加密与安全
全链路 AES-256 加密。私有化部署时数据完全不出边界。 设备认证、信令防重放、操作审计日志一应俱全。
极端场景验证过的可靠性
适配地下、高温、海上等极端工况,工业级稳定可靠
灾害救援现场
地震/火灾后的废墟环境中,公网基站损毁,只能靠自组网或卫星链路。 救援人员通过遥操让机器人深入危险区域搜救幸存者。
地下管廊巡检
数十公里长的城市地下管网,完全没有手机信号。 机器人沿管道自主巡检,通过有线+无线混合组网将画面和数据回传至地面站。
沙漠油田作业
新疆/内蒙等偏远油田,方圆百里无人烟,只有卫星通信可用。 高温、沙尘环境下机器人执行管线巡检和阀门操作任务。
电力线路巡检
输电铁塔跨越山区,无人机/巡检机器人沿高压线飞行或攀爬。 移动速度快、地形复杂、电磁干扰强,对链路稳定性要求极高。
高速公路巡检
巡检机器人以 60km/h+ 速度在高速公路上行驶, 频繁穿越不同运营商基站覆盖区,网络切换必须无缝无感。
海洋勘探平台
远海钻井平台距离陆地数百公里,只有海事卫星可用。 机器人执行甲板设备检测和水下管线检查,链路延迟高达 600ms+。
BlackEye Vision 巡检指挥中心
基于 AIRTC 实时通信底座打造的机器人巡检指挥平台。 从全景态势感知到单机远程操控,一套系统覆盖巡检作业全流程


全景运行状态
全面展示设备在线率、任务完成率、告警走势等核心 KPI 指标

数据可视化看板
热力图、趋势图等多维度分析,对巡检覆盖率、设备健康度深度挖掘

应急调度支撑
突发事件时作为指挥中心,实现资源快速定位与一键调度

远程实时控制
多路视频实时查看 + 虚拟摇杆操控,远程及处置机器人及上装设备
为什么选择AIRTC
AIRTC专为 ROS 机器人设计,从底层适配机器人系统,从指令优先级到时间同步全链路优化
方案对比
